



実際触れる! 実用化が楽しみなぬいぐるみ型ロボット「ソフトロボティクス」最先端
2015年10月13日 18時00分更新
「ロボットは人間に危害を加えてはならない。また、その危険を看過することによって、人間に危害を及ぼしてはならない」(アイザック・アシモフによるロボット三原則の一つより)
「ロボット」と聞くと、『ロビ』や『Pepper』など機械の姿を想像するかもしれませんが、最先端の現場では、人と接触しても安全で、動きに柔軟性がある「ソフトロボティクス」、ぬいぐるみ型ロボットの研究が進められています。米国MITメディアラボを筆頭にここ10年ほどで盛んに研究が行われており、将来的には介護利用のほか、さまざまな用途で可能性が広がっているまだ若い分野です。

抱いても柔らかいぬいぐるみ型ロボットの研究に励んでいるのは、東京工業大学すずかけ台キャンパスの長谷川晶一研究室。机の上に置かれたクマの人形が今研究中のぬいぐるみ型ロボットです。約5年前より代々の学生が研究を引き継ぎ改良され続けており、下記のような基本的な動きができます。
1.あらかじめプログラムされた通り動く
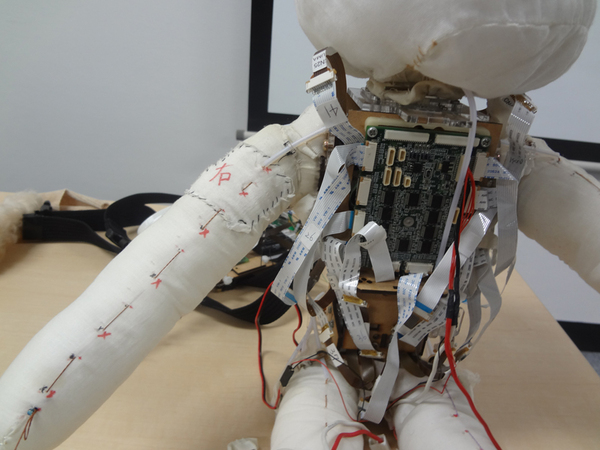
ぬいぐるみ内部には基板が内蔵されており、PCから発信した無線に反応して動きます。
2.力を加えると、センサーが反応して与えた動きと反対に動く
腕を押しこむと、反発する形で腕が持ち上がります。人間とのインタラクティブなやりとりを目指したものです。
抱き心地の良い柔らかさを実現するため、腕部分の部品は布と綿だけ。内部は市販の糸でできていて、腕の部分に糸を通し、モーターで巻き取って長さを変えることで腕の動きを実現しています。
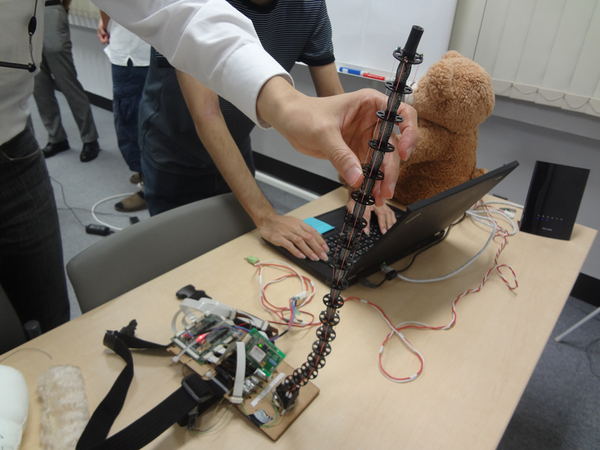
さらに、猫のような”動くしっぽ”も研究中。こちらも糸の巻き取り量によってクネクネとした動きを表現できるそうです。動いたときにできる糸のねじれを解消するため、芯には網状の素材を使っています。
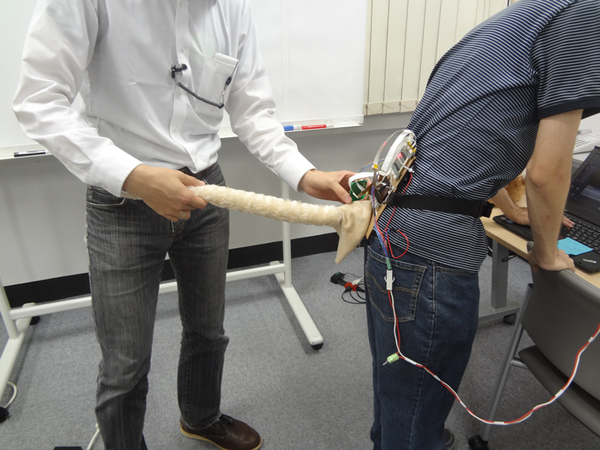
こちらは実際に装着したところ。無線を通してプログラミングした動きをしっぽに伝えています。(人間につけているのは、なんでかな)
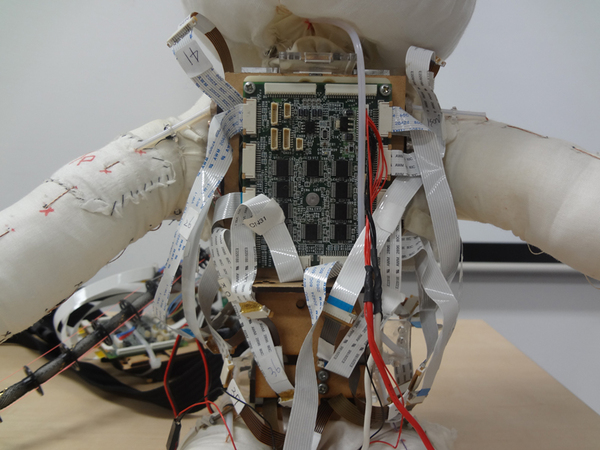
ソフトロボティクスは、工学だけでなく化学(素材研究)など横断的な広い視点が求められる分野で、今後の研究では、内部の金属部分も完全に柔らかい素材へと置き換わっていくことが期待されています。また柔らかいロボットの追求は、「芯がない」という点において、ぬいぐるみロボットが世界初ということです。
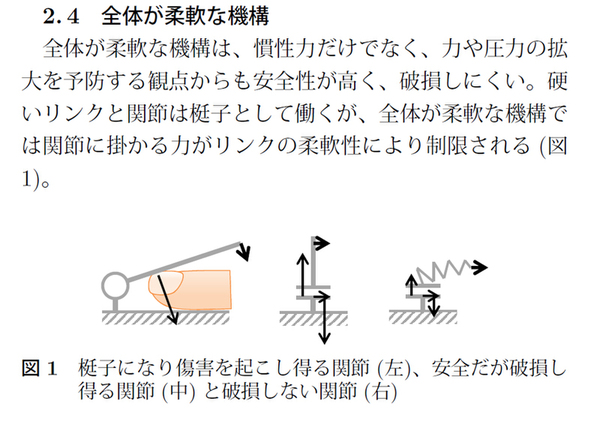
従来の動くロボットやおもちゃは、自らが壊れることで利用者を傷つけない仕組みになっていました。日本古来のからくり人形も、「木の機構」を動かすために糸を使っていました。一方で我々のぬいぐるみロボットは、「綿を詰めた袋」を糸で引く機構です。木材のような芯がないのは、我々のロボットが初めてです。柔らかさと、壊さず壊れない点がこのロボットの特徴です。また、首の回転に歯車を使っていますが、この関節では人の指を挟む可能性がない機構になっています(長谷川先生のコメント)
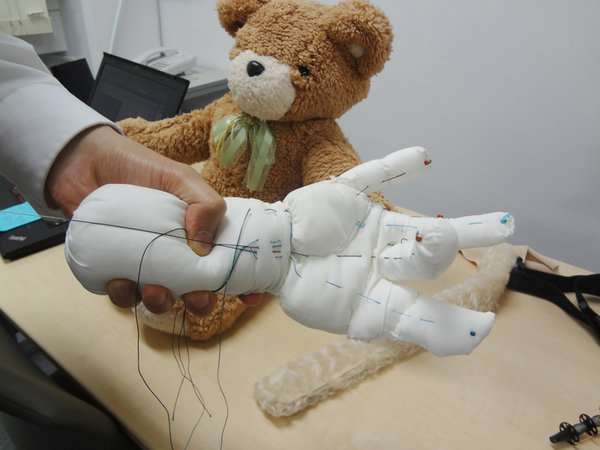
綿を詰めた袋を糸で引く機構で動かしています。
最先端の出会いによる新しいプロダクトでは、九州工業大学のセンサー研究が抱き枕と組み合わさって生まれた『痛すぽ』などがありますが、ぬいぐるみ型ロボットである「ソフトロボティクス」にも大きな可能性が眠ってそうです。
今回ご紹介した研究内容は、10月14日に東京工業大学大岡山キャンパスで行われるStartup Weekend Tokyo Techのプレイベントでもお披露目されます。お近くの方は、現場で実際にソフトロボティクスの最先端を見て触って体験してください。
また、この技術が提供されるスタートアップ体験イベントが、10月30日~11月1日の日程で、東京工業大学で開催される予定です。詳しくは、関連サイトでご覧ください。
週刊アスキーの最新情報を購読しよう
本記事はアフィリエイトプログラムによる収益を得ている場合があります