



NTTドコモと慶大、5G高信頼低遅延通信を経由し、ヒトの手を動かして感じ取れる手応えをロボット上で再現する実証実験に成功
2023年01月27日 17時30分更新
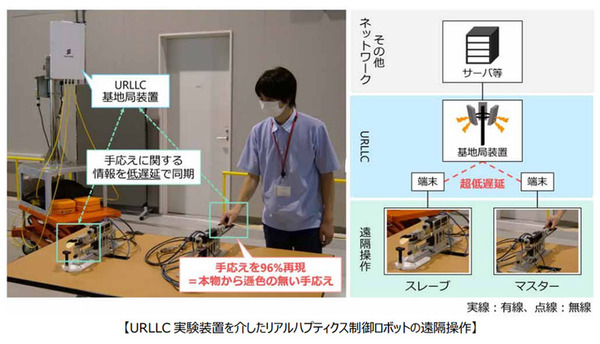
NTTドコモと慶應義塾大学ハプティクス研究センターは1月25日、5G高信頼低遅延通信「URLLC(Ultra-Reliable and Low Latency Communications)を用いてヒトの手を動かして感じ取れる手応えをロボット上で再現する実証実験に成功したと発表した。
慶應義塾大学ハプティクス研究センターが開発したロボティクス技術「リアルハプティクス」 を活用したロボットの無線遠隔操作実現に向けたもの。リアルハプティクスは、ヒトの指先や手のひらを動かして感じ取れる手応えをロボット上で再現可能な技術。ヒトが感じる繊細な感覚を遠隔地に伝えるリアルハプティクスを実現するためには低遅延な通信状態を変動なく保つ必要があるが、モバイルデータ通信環境では実現は困難とされていた。
今回、超高信頼かつ低遅延の無線技術であるURLLCを活用し、遅延時間の変動を限りなく抑えることでリアルハプティクスを用いたロボットの無線遠隔操作において、本物の物体を直接つかむ手応えに限りなく近い水準である再現度96%を実現したという。
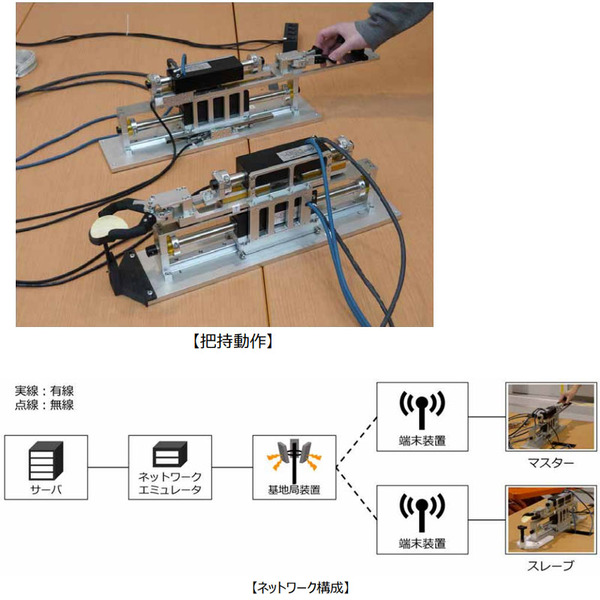
URLLCを介し固定遅延を追加しなかった場合は96%の手応え量を再現できたほか、固定遅延の追加量が30ms以下であれば80%以上の手応え量を再現できていることも確認し、この数値は有線通信で得られる手応え量とほとんど同じという。
この実証実験の成功により、屋外での利用はもちろん立ち入ることの難しい場所での活用など、新たなユースケースの広がりやロボット市場の拡大が期待できるとしている。
週刊アスキーの最新情報を購読しよう
本記事はアフィリエイトプログラムによる収益を得ている場合があります