



Cellid、悪天候でも位置情報取得を実現するVisual SLAM空間マップ作成サービス開発
2022年08月19日 07時30分更新
Cellid株式会社は2022年8月2日、カメラを用いた3次元情報取得技術「Visual SLAM」を用いた空間マップ作成で、従来は難しかった条件下でも、空間マップの作成を可能にする手法の開発に成功し、安定した位置情報の取得を実現したと発表した。
Visual SLAMは、カメラで取得した映像データから周辺環境を三次元で把握して地図を作成すると同時に、自己位置を推定する技術。Cellidは、単眼カメラの映像から、カメラの三次元位置情報を取得するサービス「Position Finder」を提供している。「Position Finder」を使用するにあたって、ユーザーは位置情報を取得するための空間マップを事前に作成する必要があるが、「雨など天候による視界不良、白壁空間で特徴点が少ない、撮影時に90度の急ターンをしてしまう」といった場合に、空間マップの作成が困難だった。結果として、作業者や建機の位置情報を得られないという課題があった。
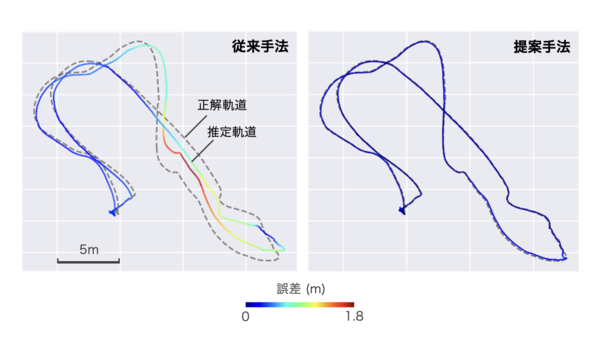
こうした課題を解決するために、SfM(Structure from Motion)といった高精細な空間マップ復元技術を活用し、天候や周囲の環境、移動状況に左右されない安定した空間マップ作成を実現。SLAM分野で知名度の高いオープンデータセット「EuRoC」で評価したところ、この手法で作成した空間マップを利用することで、自己位置の推定精度が最大で10.57倍向上することが確認できたという。
建設業などの現場では、作業員や建機の位置情報を可視化し定量的に分析することが求められているが、これまで動体の位置情報取得は難しく、実現できていなかった。今回の空間マップ作成手法によって、「Position Finder」で位置情報をより容易に安定して取得できるようになるという。CellidはVisual SLAMに関する特許を複数出願しており、本手法についても特許を出願している。
「ASCII STARTUPウィークリーレビュー」配信のご案内

ASCII STARTUPでは、「ASCII STARTUPウィークリーレビュー」と題したメールマガジンにて、国内最先端のスタートアップ情報、イベントレポート、関連するエコシステム識者などの取材成果を毎週月曜に配信しています。興味がある方は、以下の登録フォームボタンをクリックいただき、メールアドレスの設定をお願いいたします。

週刊アスキーの最新情報を購読しよう
本記事はアフィリエイトプログラムによる収益を得ている場合があります