



第868回
物理IPには真似できない4%の差はどこから生まれるか? RTL実装が解き放つDimensity 9500の真価
2026年03月23日 12時00分更新
RTL実装による物理限界への挑戦
熱を制して性能を絞り出す高精度モニタリングの全貌
温度の話もしておこう。温度も当然重要である。というのは電圧を上げても温度を低く抑えられれば、それだけ劣化の進行を遅くできるからだ(なしにはできない)。その温度センサー(T-sensor)、実際に実装するといろいろ難点がある。
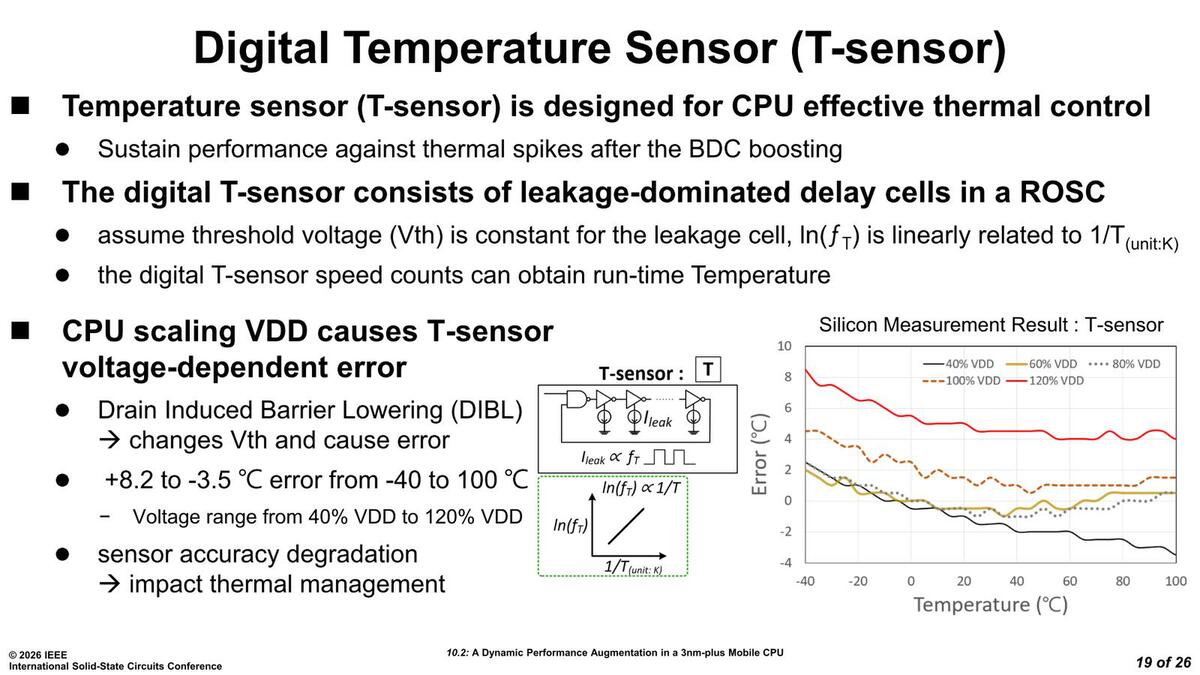
計測誤差は、特に電圧変動が大きいと影響が出やすい。かといってデジタルをやめてアナログで測定するというのも、これもまたいろいろ問題が多い
右グラフは実際の温度とT-Sensorが検知した温度の差であるが、電圧が低い時は低め、電圧が上がると高めになり、誤差は-3.5~8.2度と結構大きい。これはDIBL(ドレイン誘起障壁低下)に起因するものである。そこでDimensiton 9500ではDVTCという仕組みを導入した。
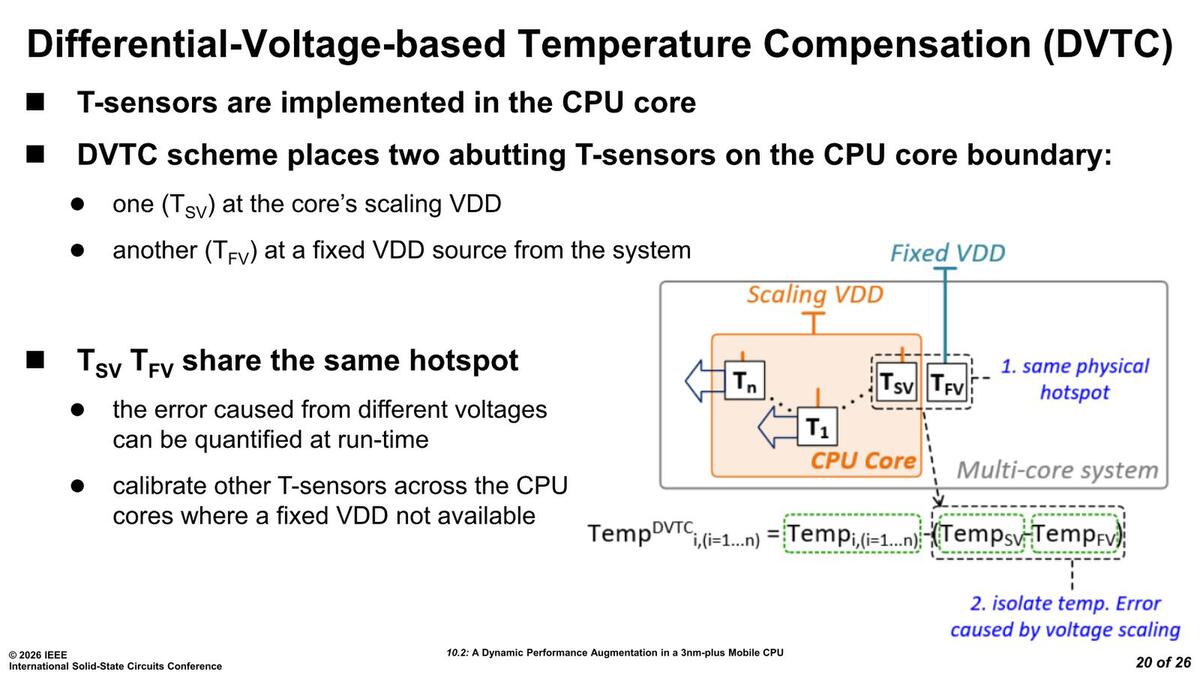
DVTCは、VDD一定の領域と可変領域の両方にセンサーを置き、温度の細かいドリフトを相殺して測定値を安定させるための方法である
結果は下の画像で、-1.6~+2.5度と、かなり現実的な精度での温度測定が可能になったとする。
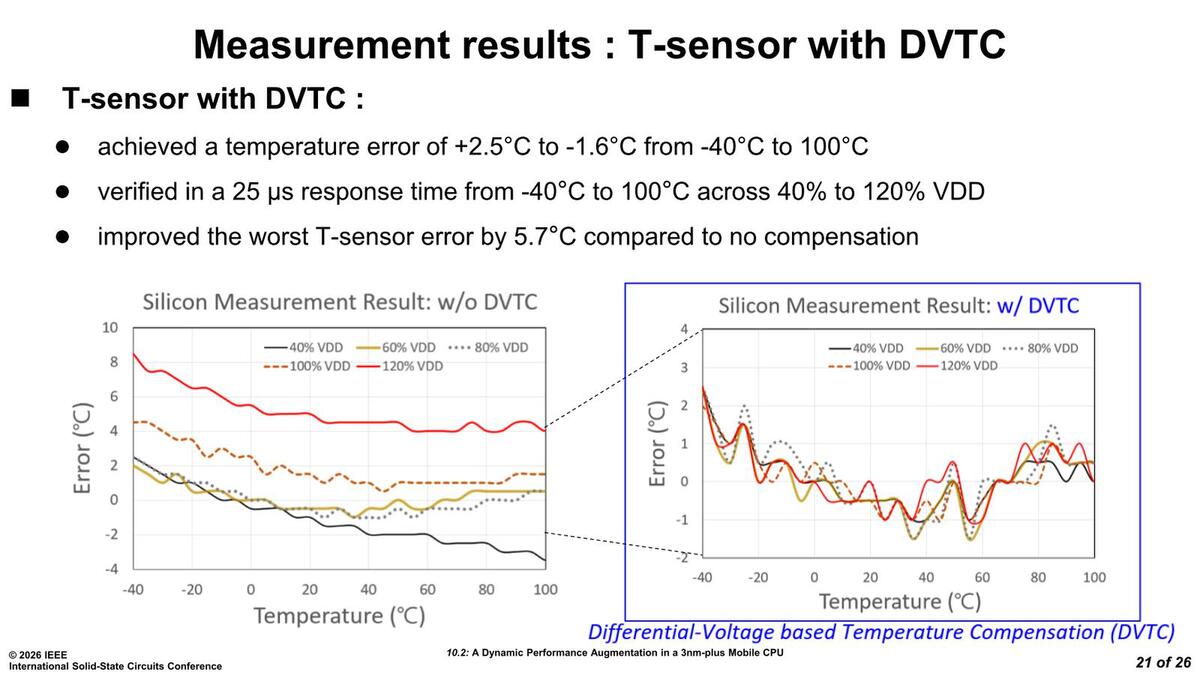
サンプリング周期は25μsと、これも結構高速である。それにしても-40~100度までこの精度なのはさすがである
A-Sensorを利用したATCとBDCをどう組み合わせるのか、というのが下の画像。右側がBTC、左側がATCになるが、Policy Configuration(これはCPUから設定できる領域で、どのくらいの上限温度とし、どの程度の頻度で温度監視して、どのくらい急速に温度を下げるかのパラメーターを設定する)からの情報を受けながら温度/電圧/電流などを監視しながら、動作周波数を下げる方向に制御する。
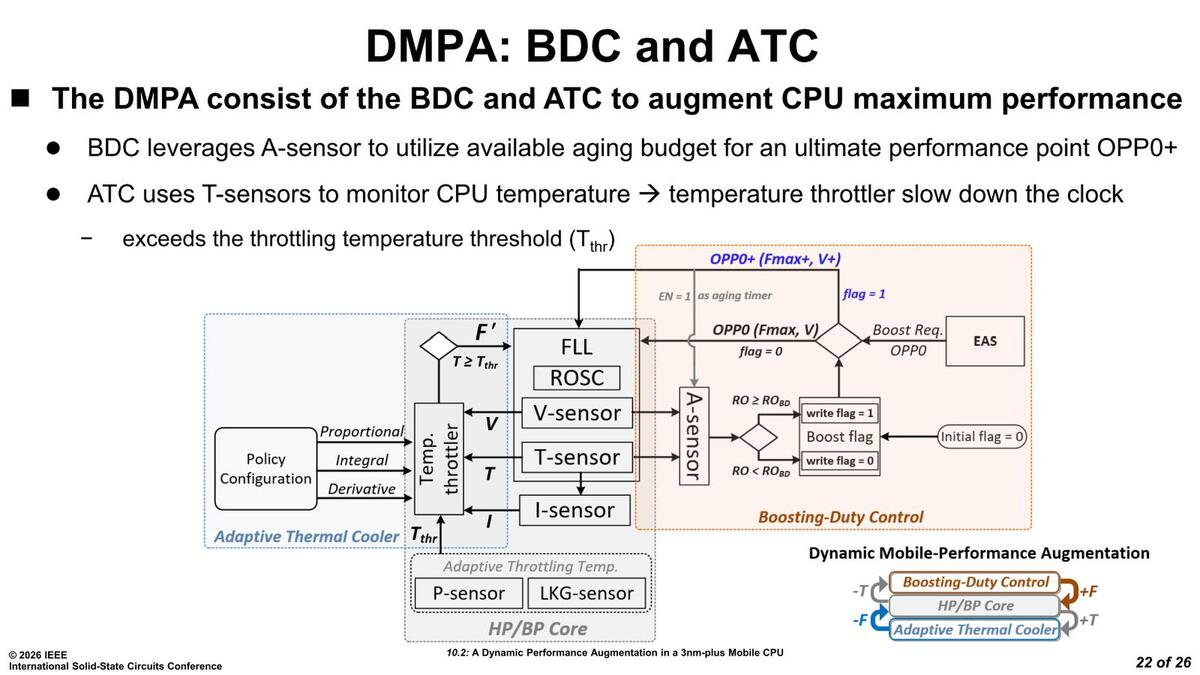
ATCとBDCの組み合わせ。Adaptive Throttling Temp.にあるP-Sensorは、On-die Process Sensor、LKG-sensorはLeakage Sensorの略である
右下にあるが、BDCは基本的に周波数を上げる(ので温度が上がる)制御で、ATCは周波数を下げる(ので温度が下がる)制御となる。この2つのコントローラーが常に動作周波数と電圧を調整することで、ちょうど手頃な動作周波数を実現できる、というものだ。
実際にこのDMPAを使った場合の動作周波数の変動というのが下の画像で、平均して4.5%ほど実効動作周波数を引き上げられたとする。
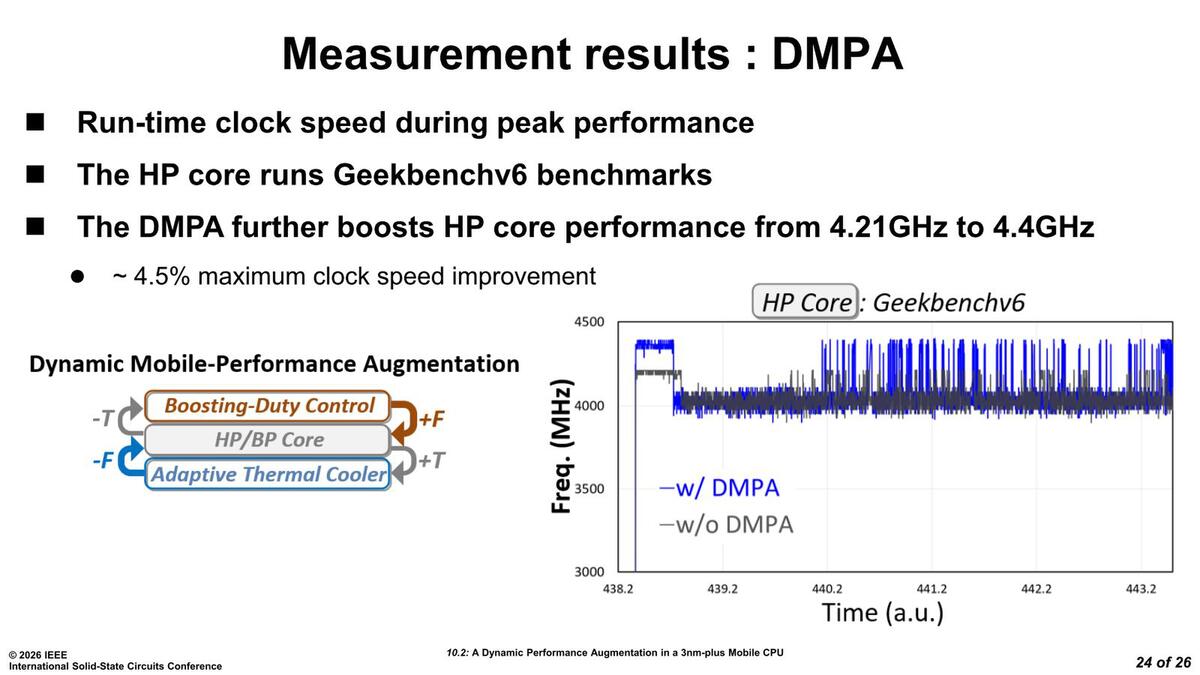
もっともご覧のように4.4GHzで動作する時間は非常に短いが、逆に言えば短く区切っているから4.4GHzまで引っ張れるという話でもある
またATCの効果だが、やはり煩雑に温度制御すると温度上昇が抑えられやすいことが確認されたとする。+8度はやや手に持つのに厳しい可能性があるが、+2度なら許容範囲であろう。
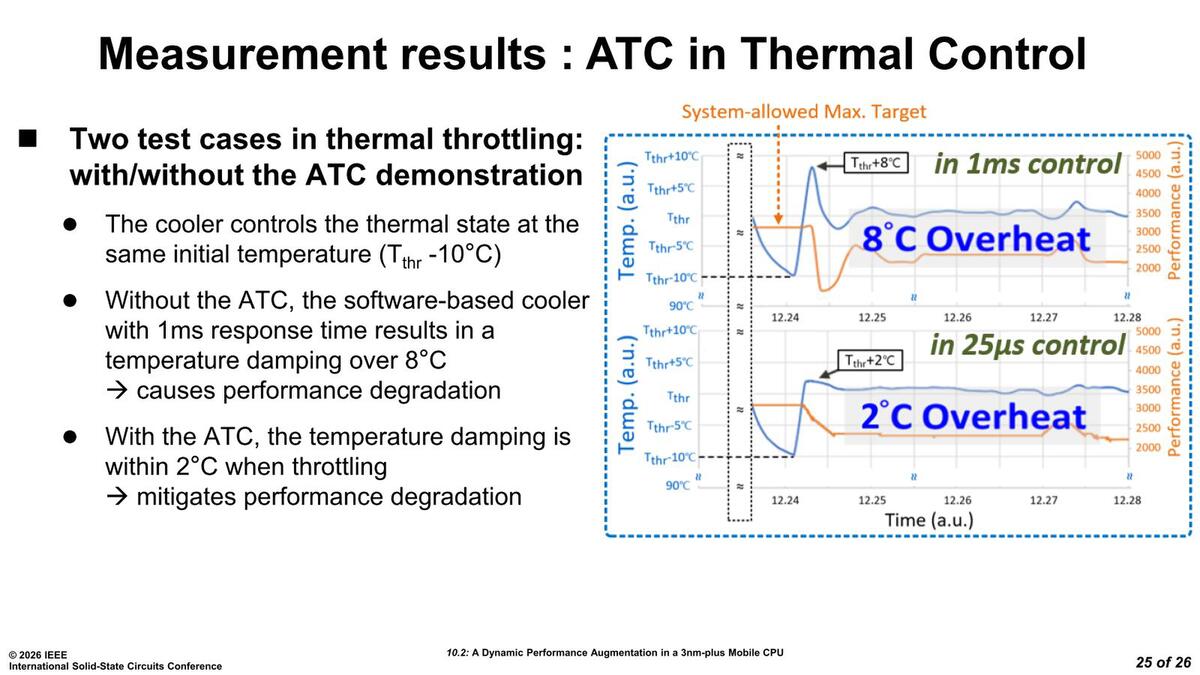
ATCで温度上昇を抑えられる。最初はActive Coolerとか書いてあるのでまさかペルチェ素子? と思ったがそうではない
しかも+8度の方は性能低下が見られた(サーマル・スロットリングに引っかかったのだろう)のに対し、+2度の方の性能低下はわずかだった、とする。結果的にGeekbench 6のシングルコア・スコアでは3762→3917と4.1%の向上が実現できた、とする。
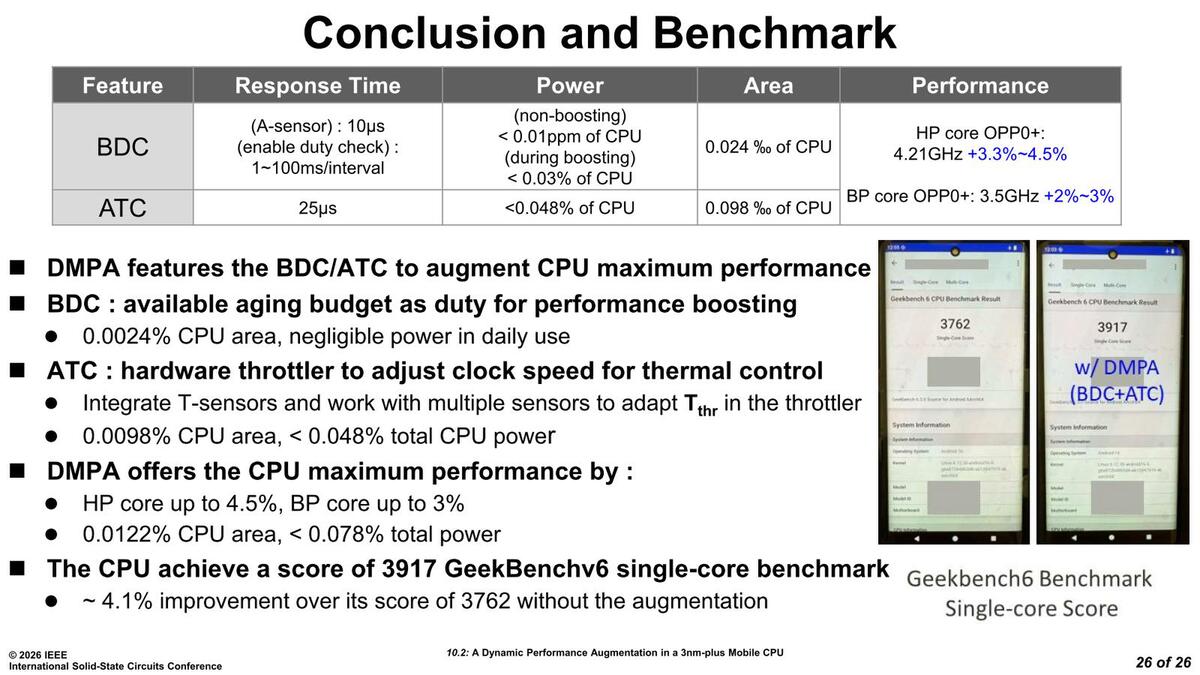
BDCおよびATCの面積は合計でもCPUの0.1‰(1万分の1)程度に抑えられ、BDC/ATC自身の消費電力も合計でCPUの0.08%弱、と非常に費用対効果の高い対策になったとする
単に物理IPを購入して実装するのではなく、RTLを購入して物理実装の際にいろいろ工夫することで、同じLumix CSSを使った競合製品に性能でここまで差を付けられる、というお手本のような実装例であった。
週刊アスキーの最新情報を購読しよう
本記事はアフィリエイトプログラムによる収益を得ている場合があります