



アスキーの会員サービスASCII倶楽部では、会員の方だけが読めるさまざまな連載や特集が毎日更新中。
本日は、ASCII倶楽部の人気記事「大阪関西国際芸術祭でロボットアームのような作品を作った」を紹介します。

2022年は展示をしなかったのでハードウェアを設計することがなかった。2023年はハードウェア設計したいな~と思っていた矢先、設計の案件がやってきた。
1月28日から2月13日まで大阪のあちこちの会場で開催される芸術祭「大阪関西国際芸術祭」の展示作品という案件だ。
キュレーターの丹原健翔さんとヌケメさんが担当する「無人のアーク」という作品の中で、ロボットアームのような作品を作ることになった。

無人のアーク
展示場所は「うめきたSHIPホール」というグランフロント大阪のちゃんとしたホールだ。やばいちゃんと作らなきゃ。
プロダクトデザインを考える
スケジュールと予算に当てはまる機構を考えて、プロダクトデザインを考えはじめたのが1月頭ごろ。
今回は、人の身長くらいの産業用ロボットのような動きものを作る。
サイズが大きいので、大きいものを簡単かつ安全に作るため、ミスミのアルミフレームを使うことにした。

アルミフレーム
ただ、アルミフレームそのままだとデザイン性に乏しいので、ポリカーボネートで装飾をする。
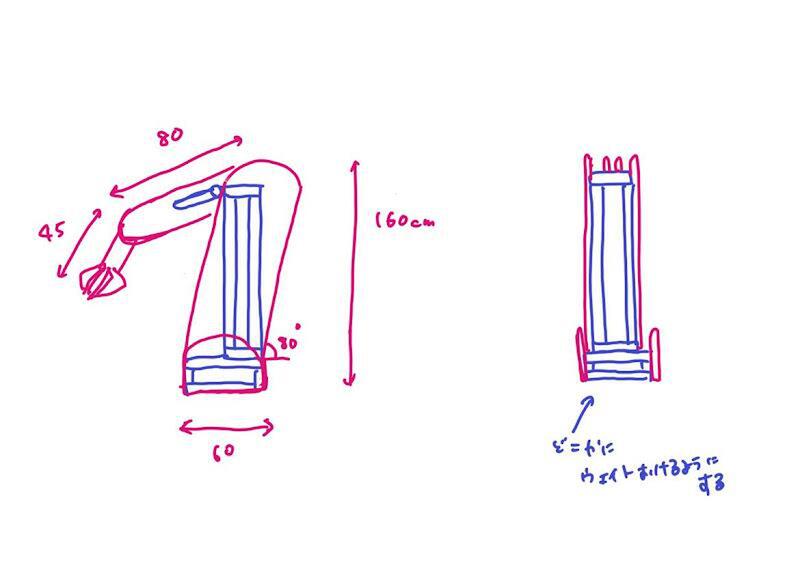
プロダクトデザインのラフスケッチ
可動するのは関節1つだけ。
筆者自身大きいものを作るのは初めてなので、安全に確実に作れるように考えた。
ミスミのアルミフレームは、「ミスミフレームス(MISUMI FRAMES)」というミスミのフリーソフトを使って設計ができる。
設計が簡単にできて、そのまま部品表ができて発注できる便利なソフトだ。
使い方については、以前こちらの連載記事( ASCII.jp:無料のアルミフレーム筐体設計ソフトウェアが役に立ちそうだ )に書いた。
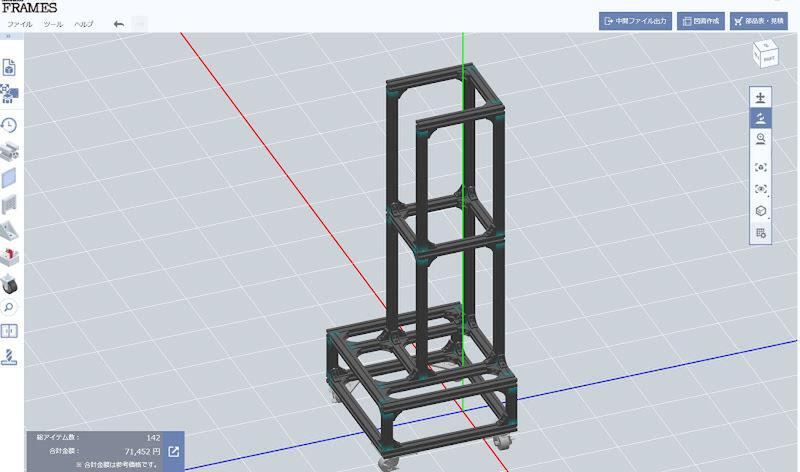
ミスミフレームスで設計した
ミスミフレームスで設計したデータを「step」データという3Dデータの形式で書き出して、お気に入りのCADソフト「Inventor」で読み込む。
1mm厚のポリカーボネートで装飾、可動部分は1.5mm厚のアルミ板金、基礎のフレームはミスミのアルミフレームという組み合わせで設計することにした。
デザインを詰めて部材を発注する
まずはざっくりとシルエットを決めていく。
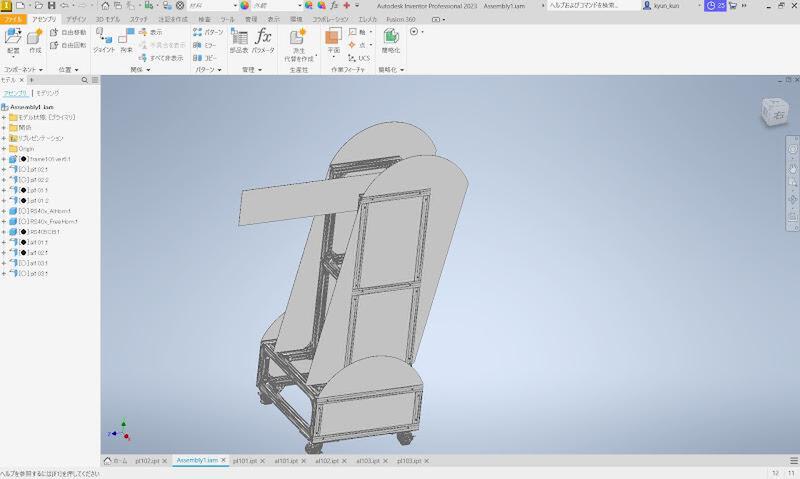
ポリカーボネートのシルエットを考える
今回、ミスミの垂直なシルエットを非垂直的に見せていくため、平行四辺形的な斜めになっている産業用ロボットアームをイメージしたプロダクトデザインにした。
シルエットが決まったら、詳細のデザインを詰めていく。
先端はUFOキャッチャーをイメージした。作品全体のテーマによるものである。
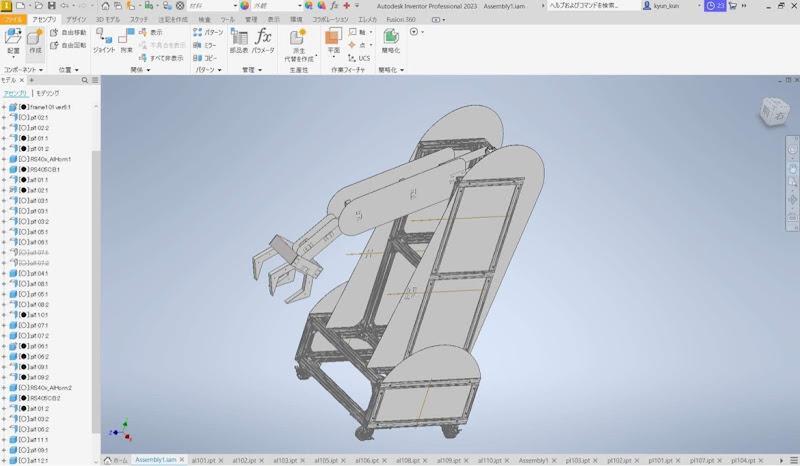
詳細のデザインを詰めていった
ポリカーボネートはレーザーカッターでカットするので、レーザーカッターのワークスペースにパーツが収まらなくてはならない。
そのため、一番大きい側面のパーツは3分割にした。
先端はポリカーボネートだけのペラペラになってしまうので、3Dプリンターでプリントした部品で補強することにした。
最近設計をあまりする機会がなかったのだが、久々に設計をちゃんとやるととても楽しい。ハイになってしまうので気をつけなくてはいけないくらいだ。
アルミフレームはミスミ、板金はいつもの海内工業さん、ポリカーボネートははざいやさんに発注した。
部材を切って組み立てる
部材が届いたら組み立てだ。
まずはレーザーカッターでポリカーボネートをカットしていく。

レーザーカッター
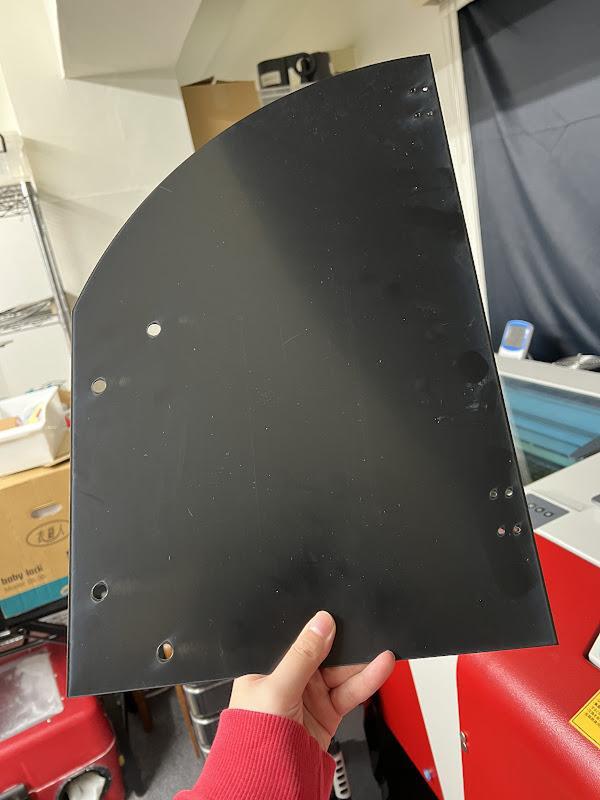
カットしたポリカーボネート
普段はアクリルをカットすることが多く、ポリカーボネートをカットするのは少し不安だったのだが、思ったより早くきれいに切れた。
透明なポリカーボネートをレーザーカッターで切ると、切った側面が茶色く焦げてしまう。しかし、黒いポリカーボネートだと焦げたところが見えないということが発見だった。
サーボを動かすプログラ厶を書く
ポリカーボネートをカットしながら、電子工作とソフトウェアを進めていく。
インタラクティブな動きなどはせず、ただガタガタ動くだけなので、Arduinoでサーボを簡単に動かしていくことにした。
いつも使っていたサーボ、フタバの「RS405CB」が廃盤になっていたことを設計していて初めて知ったのだが、時間がないので家にあった在庫を使うことにした。
ArduinoでRS405CBを動かす方法については、こちらのサイトを参考にさせていただいた。
秋月電子通商で電子部品を買って、まずはブレッドボードにジャンパワイヤで試してみる。
今回サーボを2個使って動かす。デイジーチェーンでサーボ同士を繋ぐと、一番端のサーボとマイコンを繋ぐだけで両方のサーボに別々の動きをさせることができる。
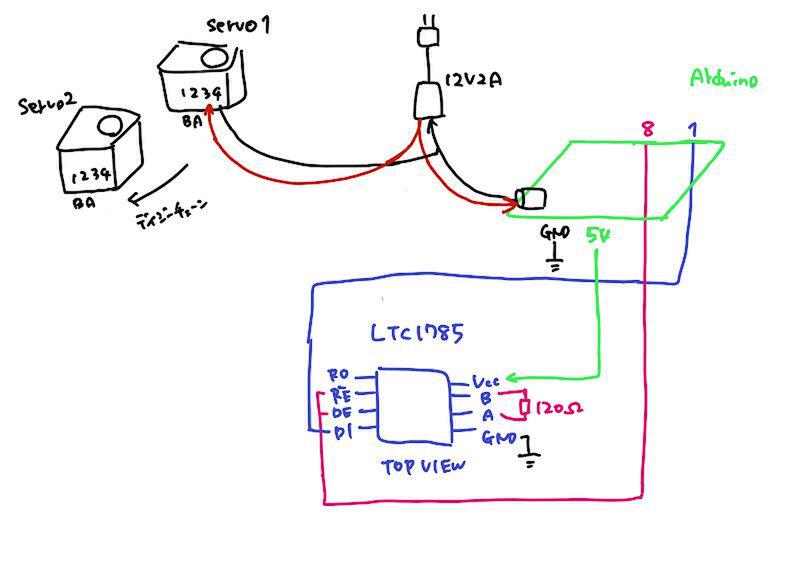
回路図
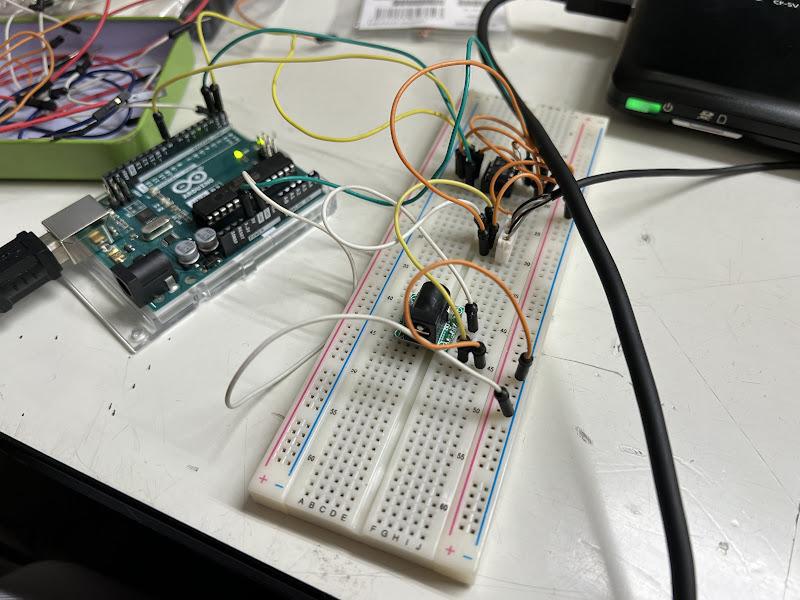
ジャンパワイヤの色がめちゃくちゃ
……しかし、動かない。
電源周りかなあソフトウェアかなあ、わからぬ。
電源まわりの可能性を潰したくて、Arduinoシールドにハンダ付けした。

お布団の上で工作してるのヤバすぎ
うーんそれでも動かない。
外装パーツに電子部品を組み込み、塗装する
そこで、頭が疲れているのかもしれないと思ってクレープを食べた。
その瞬間、コードのサーボのIDが間違っていることに気づいた!
IDを直したら、動いたのであった。
動いたので、プラスチックボックスに組み込んでいく。
裸でマイコンを置きたくないし、ACアダプタをボックスに接続してスイッチを切り替えると動くようにしたい。
プラスチックボックスに穴を開けて、DCジャックがスイッチを付けられるようにする。

お風呂で穴開けるといいよ

お気に入りのステップドリル
ミスミアルミフレームを組み立てていく。

ミスミフレームの組み立て
展示全体として黒い造形物が並ぶので、この作品も黒くする。
黒の質感を揃えるために最終的に塗装はするのだが、塗装が楽になるように黒いアルミフレームにしている。
アルミフレームの上に切ったポリカーボネートを固定していく。

大まかに組み立てた
次に可動部を組み込んでいく。
サーボのトルクだけで可動部を動かすのが難しいことはわかっていたので、引きバネを設置してサーボの援助をする。
ポリカーボネートに穴を開けて、引きバネを付けた。
ポリカーボネートだと柔らかくてバネを引っ張るだけの力がないので、アルミ板金で補強して、バネの力に耐えられるようにする。
アルミだけでやらないのは、アルミで全体を作ると重くなってしまうのと、アルミは穴を開けるのが面倒で、柔軟に設計を変えられないからである。
その後、塗装をしてもらう。塗装すると、質感がかなりマットになって、雰囲気が出てきた。

塗装してもらっているところ
選んだサーボが弱すぎたので対処を考える……
続きは「大阪関西国際芸術祭でロボットアームのような作品を作った」でお楽しみください。
なお、こちらの記事の続きを読めるのはASCII倶楽部会員の方限定です。
ASCII倶楽部には、今回紹介した記事だけでなく、PCやスマホ、カメラ、テレビ、オーディオなどの会員だけが読める連載が更新されております! さらに、週刊アスキー 電子版の最新号から過去4年ぶん以上のバックナンバーが読み放題となっております。
会員制読み放題サービス
ASCII倶楽部(アスキークラブ)
■利用料金
月額 税込1080円
※毎月1日~末日までの利用料金として
■支払方法等
●クレジットカード
* VISAカード/MasterCard/アメリカン・エキスプレスカード/JCBカード
●auかんたん決済
●ドコモケータイ払い
●Amazon アカウント
※auかんたん決済、ドコモケータイ払いを選択された方は、3日間無料キャンペーンをご利用いただけません。 ※ご利用になる決済機関によって決済時期及び決済方法が異なります。
それぞれの決済機関が定める利用規約等をご確認ください。
■提供時期
月額利用料金の支払い後、すぐに利用可能。
■推奨環境 <端末・ブラウザ>
【PC】
・OS
Windows 7 以上 , Mac OS X 10.10以上
・ブラウザ
(Windows)Internet Explorer 11※Edgeは除く , Google Chrome最新版 , Firefox最新版
(Mac)Safari最新版
【スマートフォン】
・OS
iOS 8 以上 , Android 4.x以上
・ブラウザ
(iOS)Safari
(Android)Google Chrome
URL ASCII倶楽部
週刊アスキーの最新情報を購読しよう
本記事はアフィリエイトプログラムによる収益を得ている場合があります