



NEDOシンポジウム「AI&ROBOT NEXT」レポート
物を掴んだ感触をフィードバックする義手を体験!

NEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)は2020年1月16日と17日に、新宿「LUMINE 0(ルミネ ゼロ)」にてシンポジウム「AI&ROBOT NEXT」を開催した。
NEDOの各研究委託先による人工知能とロボットについての研究発表が展示されたほか、各種デモや説明員による解説が実施された。
ロボットの義手が持つ可能性
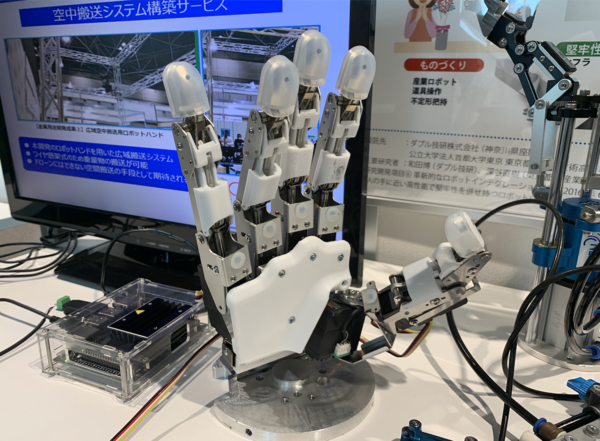
ダブル技研株式会社によるロボットハンド
入り口付近に展示され、来場者の注目を集めていたのがダブル技研株式会社の研究開発成果と、その事業化例だ。
同社では、産業用のロボットハンドを開発。物の形状に合わせてフレキシブルにつかむことができ、つかんだ後、姿勢をロックすることができる。
これを利用して、搬送、組み立て、加工工程など、精度の要求される動作にも対応できるとした。ドローンには対応できない空間搬送の手段としての利用など、2019年よりすでに商用展開されている。
つかんだ感触をフィードバック
MC-200C-6018を用いた汎用人工手のデモ
学校法人慶応義塾では、「汎用人工手」と呼ばれる、小型で自由度の高いロボットハンドの開発を進めている。
特徴は、超小型のサーボドライバ「MC-200C-6018」を組み込み、「身体感覚」を伝送できる点。
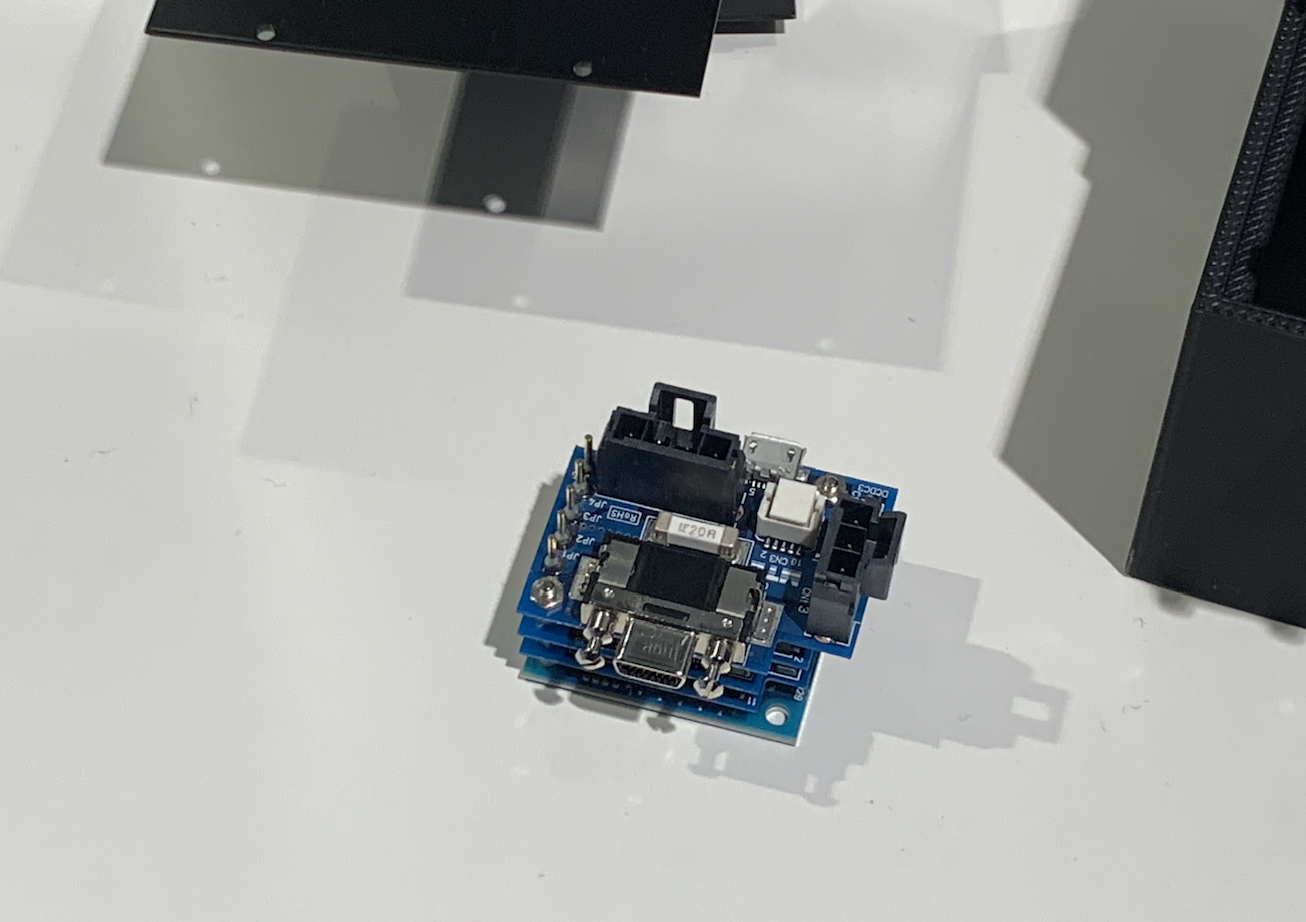
超小型サーボドライバ MC-200C-6018
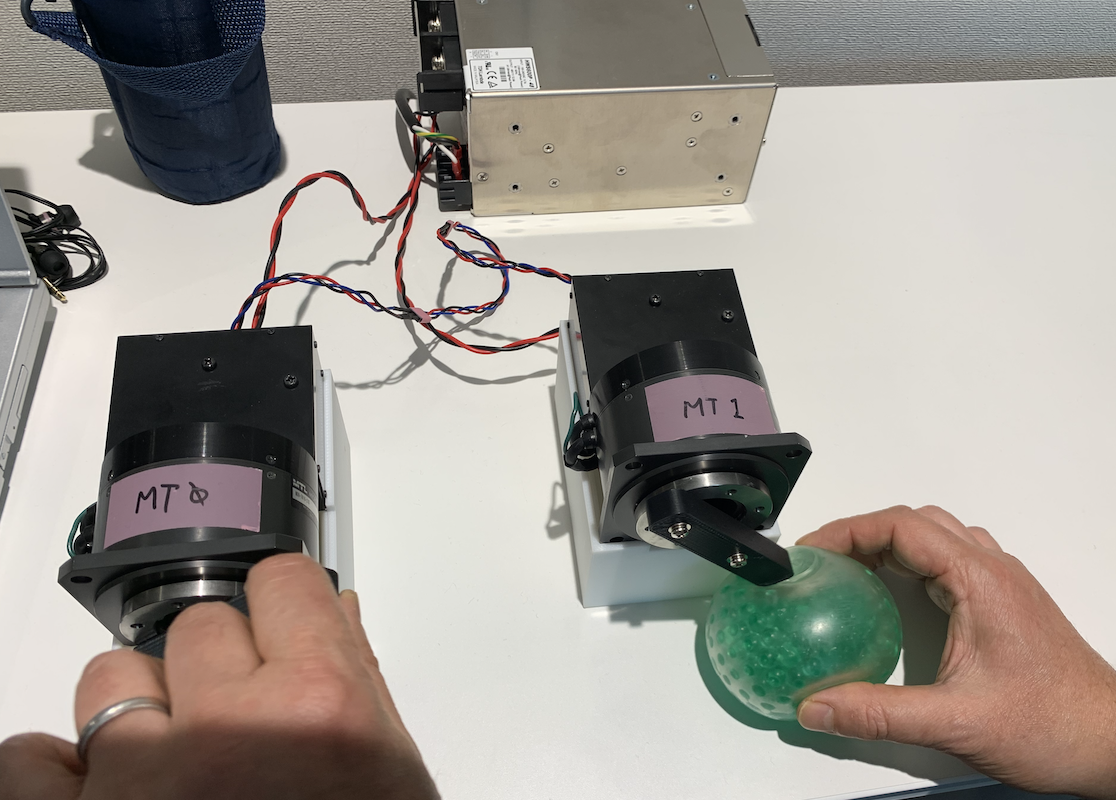
例えば、弾力性のある物質をロボットハンドで遠隔地から操作するシーンがあったとする。従来、物質をどう握っているかなどは、カメラモジュールとの組み合わせで視覚的にモニタリングできた。
MC-200C-6018を使えば、どのくらいの強さで握っているのかが、「感触」で操作側の端末にフィードバックされる。これにより、視覚情報だけでは難しかった、よりキメの細かい操作が可能になる。
MC-200C-6018はこの春にも販売される予定。また、将来的な方向として、腕に欠損のあるユーザーが、足の指などに操作用の端末を操作することで、義手で物を掴んだ感触を足の指にフィードバックさせ、力加減を調整しながら物をつかむといった用途にも活用できるとした。
筆者も、MC-200C-6018を活用したデモを体験させてもらった。ぐにゃぐにゃと柔らかいゴムボールがどれくらいつぶれているのか、また、どれくらいの力で押し戻されているのかが、操作側のバーにはっきりとフィードバックされることが体感できた。
それも、精度は非常に高い。デモはシンプルな操作バーを使ったデモだったが、インターフェースをもっとブラッシュアップすれば、よりリアルに感触を伝送できそうにも思えた。ロボットハンドの活用シーンにますますの広がりをもたらす技術ではないか。
■関連サイト
週刊アスキーの最新情報を購読しよう