



さらに高速化した「Movidius Myriad X」を採用だ!!
エッジの"神デバイス"となるか - ディープラーニング"推論"で普及を狙う「AI CORE Xスターターキット」
2019年02月20日 11時00分更新
AAEON製小型コンピュータボード「UP2」(UP Squared)
V-net AAEONのUP2(UP Squared)は、Intel製のプロセッサーを搭載した小型コンピュータボードで、サイズは85.6×90mm。Raspberry Piとの互換性を備える40ピンヘッダー、mini PCIeスロット(SATAスロットとしても使用可能)、E-Key用のM.2スロットを備えている。
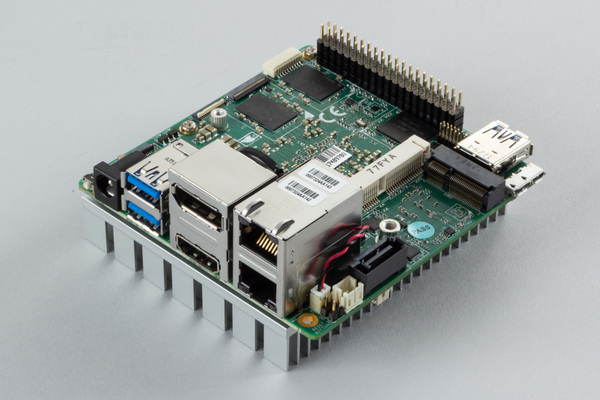
V-net AAEON UP2(UP Squared)
CPUはCeleron 3350N/Pentium N4200/Atom E3940の3種類から選択が可能で、ストレージとしてはボード上にeMMCを搭載する。メインメモリーは2GB/4GBで、ストレージ容量は32/64/128GBの3種類から選択が可能だ。
| 主なスペック(「AI CORE X」スターターキット同梱版) | |
|---|---|
| 製品名 | V-net AAEON UP2(UP Squared) |
| CPU | Intel Celeron N3350(1.1GHz-2.4GHz)/Intel Pentium N4200(1.6GHz-2.5GHz) |
| メインメモリー(最大) | 4/8GB LPDDR4(デュアル、オンボード) |
| グラフィックス機能 | Intel HD 500 Graphics(Celeron N3350)/Intel HD 505 Graphics(Pentium N4200)、HEVC/H.264/VP8対応 |
| ストレージ | 32/64GB eMMC(オンボード) |
| LAN機能 | 有線LAN(1000BASE-T、Realtek RTL8111G、RJ-45)×2 |
| ビデオ&オーディオ | HDMI 1.4b(3840×2160@30Hz対応)、DisplayPort 1.2(4096×2160@60Hz対応)、eDP、I2Sオーディオポート |
| USB | USB 3.0(Type-A)×3、USB 3.0 OTG(Micro-B)、USB 2.0(+UART デバッグポート)×2 |
| カメラ | MIPI-CSI2 2-lane(2MP)、MIPI-CSI2 4-lane(8MP) |
| 拡張機能 | 40ピンヘッダー+4チャンネル 12bit A/Dコンバーター(500ksps - 1Msps)、60ピンEXHAT、mini-PCIe(PCIe Gen.2、BIOSでmSATAモード対応)、M.2(2230、PCIe Gen.2)、SATA3(フルサイズ、SATA 6Gb/s) |
| RTC | 搭載 |
| 本体サイズ | 85.60×90mm |
| 電源 | 5V DC-in(4A-6A) 5.5/2.1mm端子 |
ディープラーニング“推論”用アクセラレーター「AI CORE X」
UP AI CORE Xは、現在はIntelが手がけているVPU、Intel Movidius Myriad Xを搭載する製品だ。
Intel Movidius Myriad Xは、深層学習に最適化された16基のVLIW仕様「SHAVE Vector Processor」を採用しており、センサーやカメラから取り込んだ環境データから、深層学習を用いて推論を高速に実行できる。従来チップMyriad 2の約10倍の性能(1TOPS)を誇るというから驚きだ。UP AI CORE Xは4Gbit LPDDR4メモリー内蔵タイプのMyriad X 2485を利用しており、動作確認済み推奨ボードは、前述のUP2(UP Squared)となっている。

Intel Movidius Myriad X
UP AI CORE Xは、後述のOpenVINOを利用可能なほか、コミュニティーサイトでさまざまな情報・技術サポートを得られるようになっている。
| 主なスペック | |
|---|---|
| 製品名 | V-net AAEON AI CORE X |
| SoC | Intel Movidius Myriad X 2485 |
| チップ数 | 1 |
| 対応フレームワーク | TensorFlow、Caffe |
| ヒートシンク | 30mmヒートシンク付き |
| フォームファクター | Mini PCI-Express |
| サイズ | 51×30mm |
| 対応OS | Ubuntu 16.04TLS(x86_64)以降 |
| 対応ハードウェア環境 | mPCI-Eスロット搭載、1GB以上のメモリー、空き容量4GB以上のストレージ |
| 動作確認済み推奨ボード | V-net AAEON UP2(UP Squared) |
Intelの深度カメラ「Intel Real Sense Depth Camera D435」とは?
AI CORE Xスターターキットにセットとして含まれるカメラは、一般的なWebカメラではなく、Intelの深度カメラ(デプスカメラ)「Intel Real Sense Depth Camera D435」となっている。映像の奥行きなどの距離を測定可能な上にリーズナブルな価格で人気の製品だ。

Intelの深度カメラ(デプスカメラ)、Intel Real Sense Depth Camera D435
基本的なハードウェア仕様は、深度センサ視野角がHDの場合H86×V57×D94(+-3)度、VGAの場合H74×V62×D88(+-3)度。出力解像度(DepthStream)最大1280×720ドット、出力フレームレート(DepthStream)最大90fps、最小深度距離(Min-Z)約0.1m、最大レンジ 約10m(較正、背景、照度状況による)、解像度およびフレームレート(RGBセンサー)1920×1080ドット(30fps)、RGBセンサー視野角69.4×42.5×77となっている。
インターフェースはUSB 3.0 Type-C。サイズは90×25×25mmだ。
| 主なスペック | |
|---|---|
| 製品名 | Intel RealSense Depth Camera D435 |
| 深度技術 | Active IR stereo(グローバルシャッター) |
| カメラモジュール | Intel RealSense Module D430 +RGB Camera |
| VPUボード | Intel RealSense Vision Processor D4 |
| 最小深度(Min-Z) | 105mm(解像度424×240ドット時) |
| 最大深度 | 10m |
| Depth 解像度(FPS) | 1280×720(最大30fps) |
| Depth HD視野角(Depth FOV HD) | HD:H86×V57×D94(+/- 3) |
| Depth VGA視野角(Depth FOV VGA) | HD:H74×V62×D88(+/- 3) |
| RGB解像度 | 1920×1080(30fps) |
| RGB 視野(RGB FOV) | H69.4×V42.5×D77(+/- 3) |
| インターフェース | USB 3.0 Type-C端子 |
| サイズ | 90×25×25mm |
Movidius Xの推論性能を引き出す「OpenVINO」
OpenVINOは、TensorFlow、ONNX、MXNet、Caffeなど幅広い推論フレームワークに対応するほか、既存のコンピュータービジョン向けにはOpen CV、ダイレクトコーディングに向けてはOpen CLなどをサポートしている。
OpenVINOを使うことで、CPUは既存の2倍の性能を引き出せる上、インテルFPGAでは既存のCPUの約1.4倍、Movidius VPUでは既存の組み込みチップの約5倍の推論性能を実現するという。
OpenVINOはAgentVI、Dahua、Dell、GE Healthcare、Hikvision、Honeywellなどで導入されており、医療用画像診断の性能を向上させたり、サポートするカメラの台数自体を増やすことが可能になっている。
サポートOSは、すでにおなじみの「Ubuntu」
RealSence Camera付きAI CORE Xスターターキットの開発環境としてプリインストールされているOSは「Ubuntu 16.04 LTS」(Xenial Xerus、64bit版)だ。
Ubuntu 16.04 LTSは1世代前のLTS版ではあるものの、サポート終了日(End of Life)は2021年4月となっており、実用の環境とするには問題ない(Ubuntu Wikiの「Releases」参照)。OpenVINOのサンプルを利用するためのスクリプトなども合わせてインストール済みなので、開発環境の構築でまごつくことはないだろう。
週刊アスキーの最新情報を購読しよう