



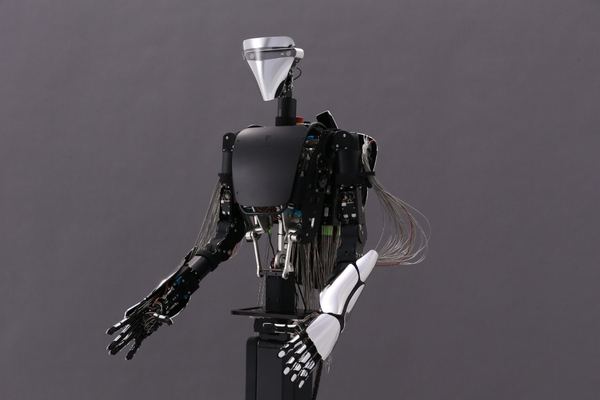
メルティンMMIは3月12日、独自開発のアバターロボット「MELTANT-α(メルタント・アルファ)」を発表した。
同社は身体の動作を忠実に解析する「生体信号処理技術」と、生体模倣から着想を得た「ロボット機構制御技術」をコアとするサイボーグ技術を使って、実用可能な「筋電義手」を開発してきたという。
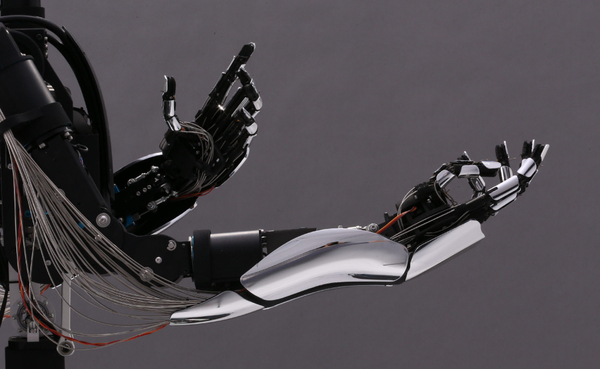
MELTANT-αはそのサイボーグ技術のノウハウを生かして開発したアバターロボットのコンセプトモデル。手の動作構造は、人の身体、特に筋肉と腱の構造をリサーチして製作。複数の筋肉群が複数の関節を動かすことによって動作する人の手を、ワイヤー駆動によって再現。サイズ・重量は人の手と同じとのこと。
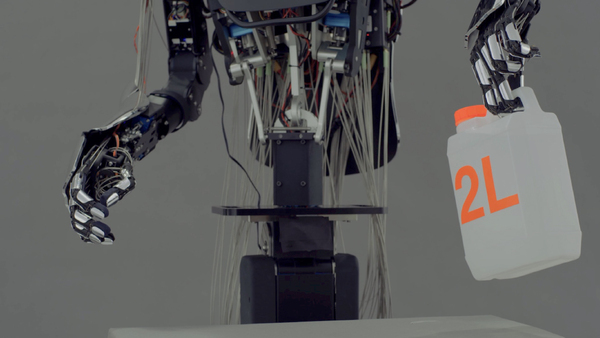
ワイヤー駆動により、片手でも2kgのボトルを持ち上げたり、4kg以上の物体を両手で支えるといった動作が可能。アクチュエーターに依存しないため、油圧などほかのアクチュエーターと組み合わせられる。
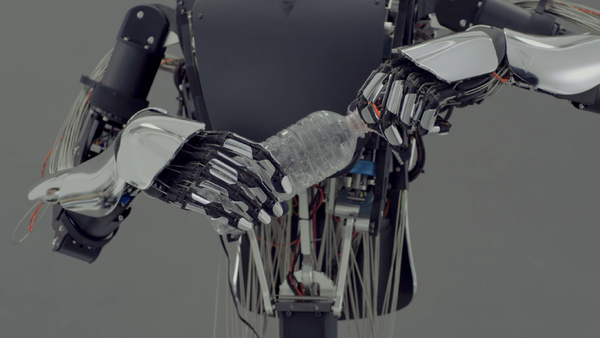
独自の制御アルゴリズムによって、卵を割らずにつかんだり、ペットボトルのキャップを開けたり緻密な動作もできるという。
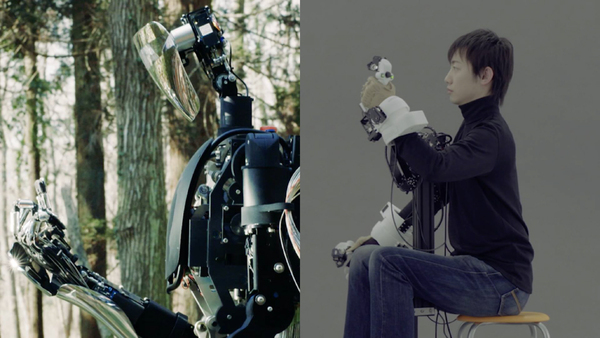
そのほか、1万8900km離れた場所からタイムラグの少ない遠隔操作が可能。高い耐故障性とフェイルセーフ機能により過酷な環境の作業ができる。また、力覚をフィードバックすることで力加減の調整も可能だという。
ハンド単体、ハンド・アーム、全身の3プロダクトを展開する予定とのこと。
週刊アスキーの最新情報を購読しよう
本記事はアフィリエイトプログラムによる収益を得ている場合があります