



最高峰のプログラム技術と車体設計が要求される
「マイクロマウスハーフ競技」
大会の締めは最も高度なプログラミング技術とマウス設計技術が必要な「マイクロマウスハーフ競技エキスパートクラス決勝」。
2009年からさらなる技術研鑽のためにはじまったこのクラスで使われる迷路は、9cm×9cmの正方形ブロックを32×32個並べたもの。ゴールまでのルートも複数存在するためクラシック競技とは比べものにならないほど複雑で高度な自律走行プログラムが要求されます。
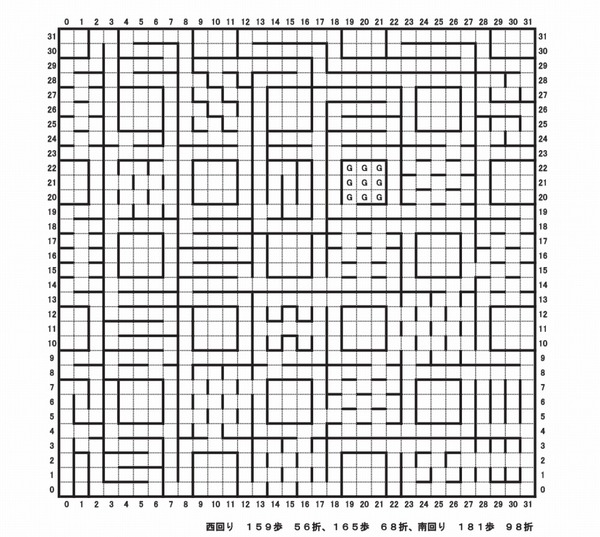
今年は珍しくルートは2パターンだけだったが、迷路をレイアウトした人にもどちらのルートが正解かはわからないほどさまざまな解析要素があるという
また、コース幅がクラック競技の半分になったことで、当然使われるマイクロマウスのレギュレーションサイズも半分の12.5×12.5cm以下で作らなければならず、高い工作精度も要求されます。ある意味、技術者冥利に尽きる競技です。
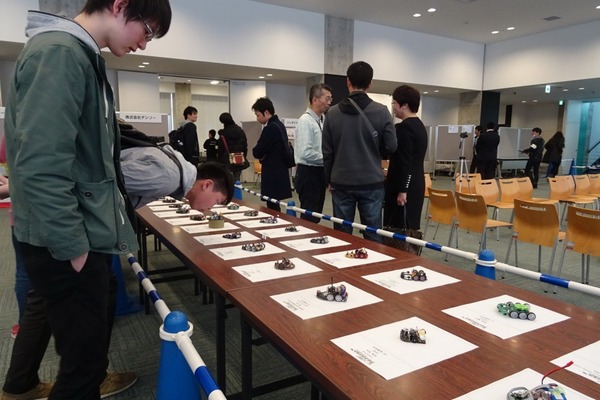
マイクロマウス大会の趣旨はあくまでも「ロボット技術の研鑽」にあるため、競技に参加しているマイクロマウスは他の参加者が自由に見られるように展示されている
5回の走行のベストラップで競うというルールは同じですが、迷路がより複雑になるため競技時間は10分間。参加者の多くが持ち時間の5~7分ほどを“探索走行”に費やしていました。

競技が始まる直前まで迷路はベールに包まれているため、迷路を事前に解析することはできない。自律マウスによる迷路解析プログラムと走行性能が問われる
【マイクロマウス(ハーフサイズ) エキスパートクラス優勝走行】
なんと、優勝者はクラシック競技を征した宇都宮正和選手。マイクロマウスハーフ競技が2009年に始まって以来、クラシックとのダブルタイトルを獲得したのはこれが初という快挙を成し遂げました。

宇都宮正和選手は、最優秀選手に贈られる田代賞も受賞
優勝マウスの「翠嵐」の基本的な構造はクラシック競技を征した「赤い彗星」に似ていますが、センサーの取り付け方向などに違いが見られます。またクラシック競技、ハーフ競技ともにいちばんのキモとなるのが、マウスを自律走行させるプログラム。
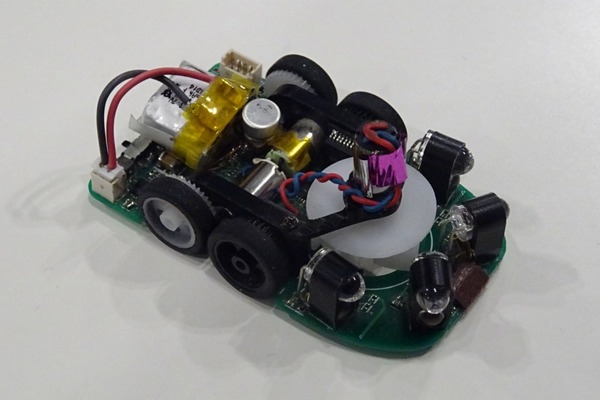
工作精度を上げるため、ギアなども全て自作したものを使用
通常のマウスなら180度切り返すコーナーでは、多くのマウスは90度ターンを2回くりかえすことで曲がるのですが、宇都宮選手のマウスは曲率を計算し1回のターンでスムーズに曲がることでタイムを短縮、自律プログラムの優秀さがその走りからみてとれました。
閉会式にはマイクロマウス委員会の委員長であり、芝浦工業大学の特任教授でもある油田伸一氏が登壇しました。
油田伸一氏「中学生や女性の参加もあり、とにかくレベルが高い、素晴らしい技術が見られた大会でした。今までマイクロマウスを作ってきた人達は、マイクロマウス作りを通してロボットやメカトロニクス、ソフトウェア開発、システムインテグレーション、AI開発知識を培い、国内外の幅広い分野で活躍しています。この機会にマイクロマウスにもっと興味を持ち、他の技術者との親交を深め、さらに自身の技術を磨いてください」
【マイクロマウス2017決勝結果】
■ マイクロマウス(ハーフサイズ)競技エキスパートクラス
優勝:遠藤 隆記(RS-100)14秒301
2位:平井 雅尊(Cartis04.5)14秒377
3位:Ng Beng Kiat(Ning3)14秒788
■ マイクロマウスクラシック競技エキスパートクラス
優勝:宇都宮正和(赤い彗星)7秒284
2位:Peter Harrison(Decimus 5)7秒415
3位:赤尾 健太(黒椿)8秒306
■ マイクロマウスクラシック競技フレッシュマンクラス
優勝:GuoZhibin(Juice)10秒559
2位:市河 拓(BAVE)8秒961
3位:Tian Dawei(Potato)10秒380
■ マイクロマウス(ハーフサイズ)競技エキスパートクラス
優勝:宇都宮正和(翠嵐)10秒559
2位:小島 宏一(こじまうす12)11秒054
3位:松井 祐樹(Fantom 2nd)11秒383
■ ロボトレース競技
優勝:遠藤 隆記(RS-100)14秒301
2位:平井 雅尊(Cartis04.5)14秒377
3位:Ng Beng Kiat(Ning3)14秒788
週刊アスキーの最新情報を購読しよう
本記事はアフィリエイトプログラムによる収益を得ている場合があります